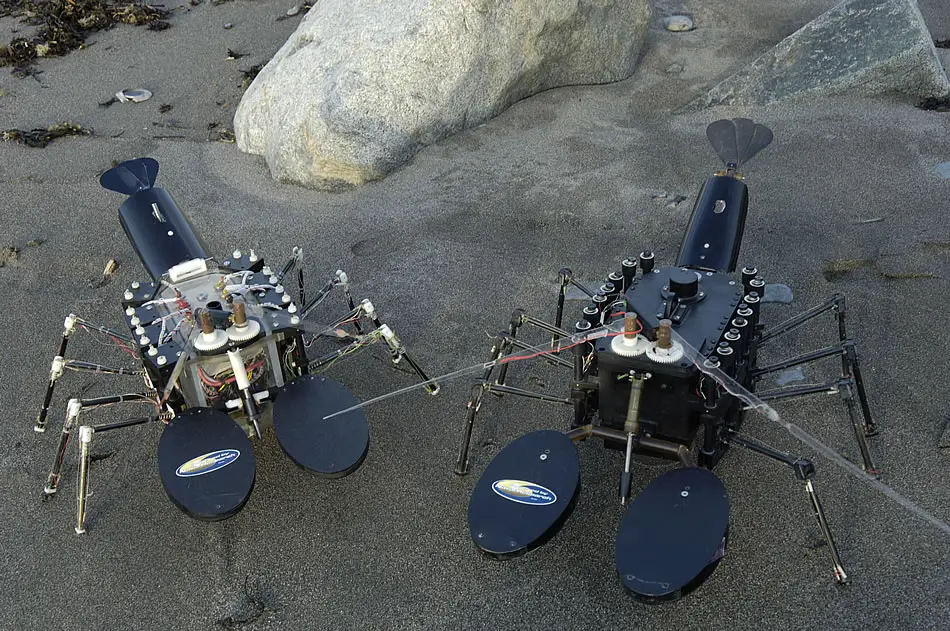
The Biomimetic Underwater Robot, Robolobster (BUR-001), at Northeastern University�s Marine Science Center in Nahant, Mass. Biomimetic robots are, in principle, relatively small, agile and relatively cheap, relying on electronic nervous systems, sensors and novel actuators. Most importantly, they can take advantage of capabilities proven in animals for dealing with real-world environments.
Posted: 04/01/2006
The BUR-001 is autonomous underwater ambulatory robot. It consists of an 8� by 5� hullactuated by eight three-degree of freedom legs and stabilized by anterior and posteriorhydrodynamic control surfaces. It can be powered by either a rechargeable NiMH or lithium ionpolymer battery pack and controlled a neuronal-circuit based controller. The proprietary controllerimplements a behavioral set reverse engineered from action sequences of lobsters adapting to thetarget search environment. The vehicle is designed for operation in shallow waters that featurecurrent and surge. (U.S. Navy photograph by John F. Williams - 3/2/2006)